前回の記事の続き。
4.光センサー(cds)をつなぐ
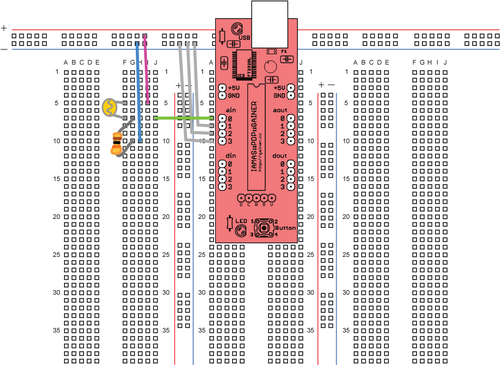
光センサーからの値をgainerのアナログイン(ain)から読む。いわゆる分圧的な接続。
ain 0にcdsの値が入ってるけど、他の使用してない1~3chはGNDに落としておく。
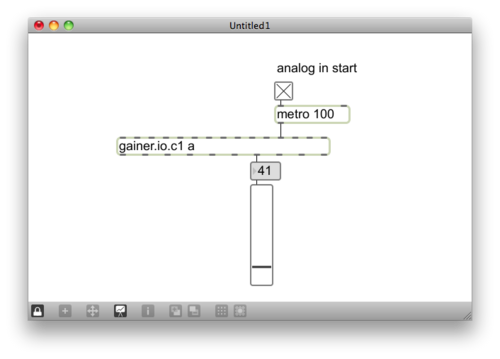
mas/mspのパッチはこんな感じ。右から4番目のインレットにbangを周期的に送らないとアナログインの値が更新されない。metroの間隔は100だとちょっとトロいかも。10〜50くらい。
5.赤外線距離センサーを繋ぐ
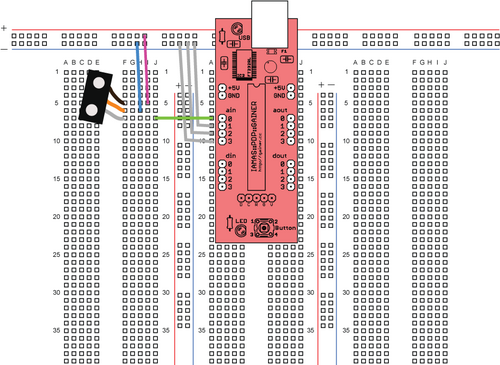
SHARPの赤外線距離センサーを繋ぐ。距離に応じた電圧をVoから出力するアナログタイプ。測定可能な距離が違う3種類を秋月電子で購入できる。
同梱されてる仕様書を見ながら、電源、GND、Voutを配線する。とても簡単。
一番でかいGP2Y0A710K0Fは送受信で電源が分かれている関係でケーブルが5本あるけど、電源、GNDをまとめて配線すれば同じように使える。
アナログインを読むので、当然maxのパッチは同じね。
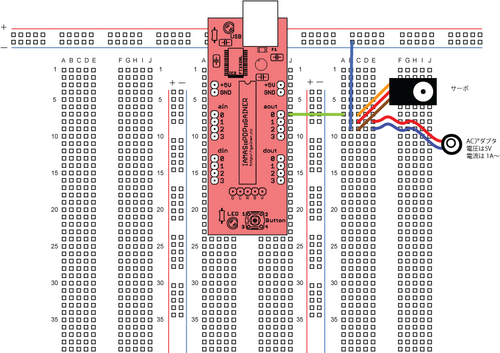
5.サーボモーターを動かす。
サーボモータは、S03T/SBBMGというのを使う。ピンの配列によって「フタバ」と「JR」とタイプがわかれたりします。今回は「JR」タイプを使用します。
サーボモーターは、普通のぐるぐる回転するモーターではなくて、角度を指定するとその角度を維持するモーター。角度の指定はパルス信号(on/off)のonの長さで指定する。gainerのaoutはPWMによって動いてるので、このaoutを利用する。
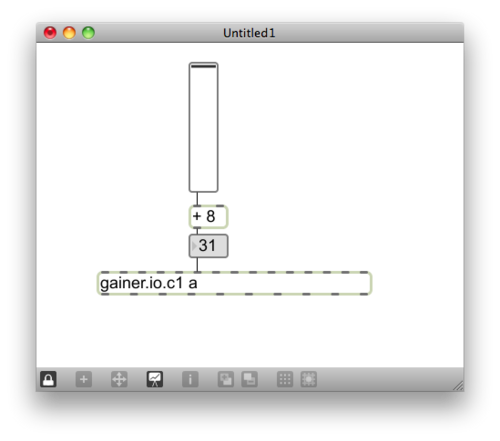
max/mspはLEDの明るさを変えた時のaoutのやり方と基本は同じ。ただしサーボモータが
gainerのaoutのうち、8〜31までの値しか解釈できないので、その範囲の値のみを送るように工夫する。